

- 1.01 MB
- 2022-04-29 13:54:05 发布
- 1、本文档共5页,可阅读全部内容。
- 2、本文档内容版权归属内容提供方,所产生的收益全部归内容提供方所有。如果您对本文有版权争议,可选择认领,认领后既往收益都归您。
- 3、本文档由用户上传,本站不保证质量和数量令人满意,可能有诸多瑕疵,付费之前,请仔细先通过免费阅读内容等途径辨别内容交易风险。如存在严重挂羊头卖狗肉之情形,可联系本站下载客服投诉处理。
- 文档侵权举报电话:19940600175。
'无人驾驶与相关传感器行业分析于2016-07-25撰写完毕前言:本文聚焦于无人、自动驾驶,旨在让读者了解无人驾驶行业和传感器的情况,主要分析自动驾驶、感知层的各传感器、传感器的技术和基本面分析,重点单独展开毫米波雷达和激光雷达的对比。1无人驾驶概览1.1概念与概况:无人驾驶正从ADAS向半自动化、全自动化驾驶前进智能和无人驾驶含义:智能汽车是利用雷达、摄像头等先进传感器、控制器和执行器等装置,通过车载传感系统和信息终端实现车与人、其他车、路和云端的智能信息交换,具备智能环境感知能力,能够自动分析汽车行驶安全及危险状态,最终实现替代人操作的新一代汽车。完全无人驾驶是智能汽车发展的终极目标,不过目前智能驾驶处于初级阶段,即实现了自适应巡航(ACC)和车道偏离预警(LDW)等驾驶辅助系统。无人驾驶发展阶段:美国高速公路管理局(NHTSA)将无人驾驶技术划分了5个阶段,分别为无自动化(L0级)、个别功能自动化(L1级)、多项功能自动化(L2级)、受限条件下自动驾驶(L3级)和完全自动驾驶(L4级)。其中L0~L2阶段,主要是ADAS(AdvancedDriverAssistantSystem,高级驾驶辅助系统)的应用普及阶段。ADAS可以实现多种主动安全功能,伴随ADAS渗透率与融合度的提高,汽车的智能水平得到显著提升,并过渡到L3水平。当无人驾驶技术进入L3阶段后,可以有条件的实现无人驾驶。借助于成熟的车联网(V2X),最终将实现完全的无人驾驶,即L4阶段。ADAS无人驾驶系统组成:ADAS包括感知层的传感器、处理层的算法芯片、执行层的执行器,无人驾驶包含高级ADAS单车智能中的环境感知、控制执行,以及自动驾驶车辆与交通管理中的人机交互、V2X通信、车联网数据服务。
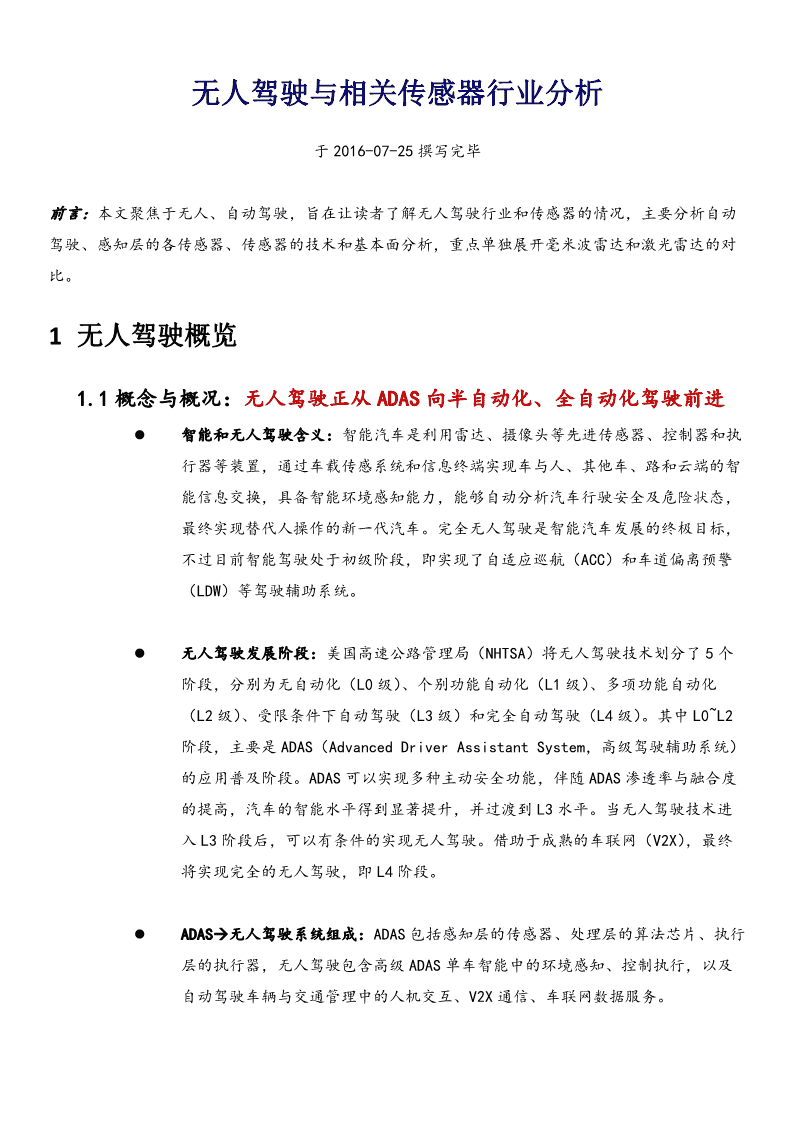
1.2未来融合趋势:摄像头+超声波+毫米波+激光雷达+V2XADAS无人驾驶发展阶段:ADAS系统到无人驾驶在快速演变,这也同样带来传感器、系统构架等方面的需求增加。这一演变过程分为以下四个阶段:一、多个传感器的使用,覆盖车辆四周360度;二、多个传感器之间相互融合和冗余,增加系统可靠性;三、除了对障碍物的检测,更重要的是对环境的感知;四、多城控制的使用,使系统构架从ADAS的分布式构架向集中控制式构架转变。V2X体系:V2X应用场景丰富,ADAS及地图导航系统需求进一步增强:美国、欧洲和日本在V2X车联网技术研究处于领先地位,均已定义了车-车、车-路通信的相关标准,逐步开始在实际环境中进行测试。随着各国车联网战略布局加快,推动应用的ADAS系统及地图导航系统需求进一步增强。汽车安装大量的传感器,同时具备强大的运算能力,由此获得近似于人类的感知,自主获取并分析道路环境信息:识别行人、其他车辆、信号灯、导航地图等,从而更全面地介入到车辆控制当中,最终进化到无人驾驶形态。图1:无人驾驶发展阶段示意图
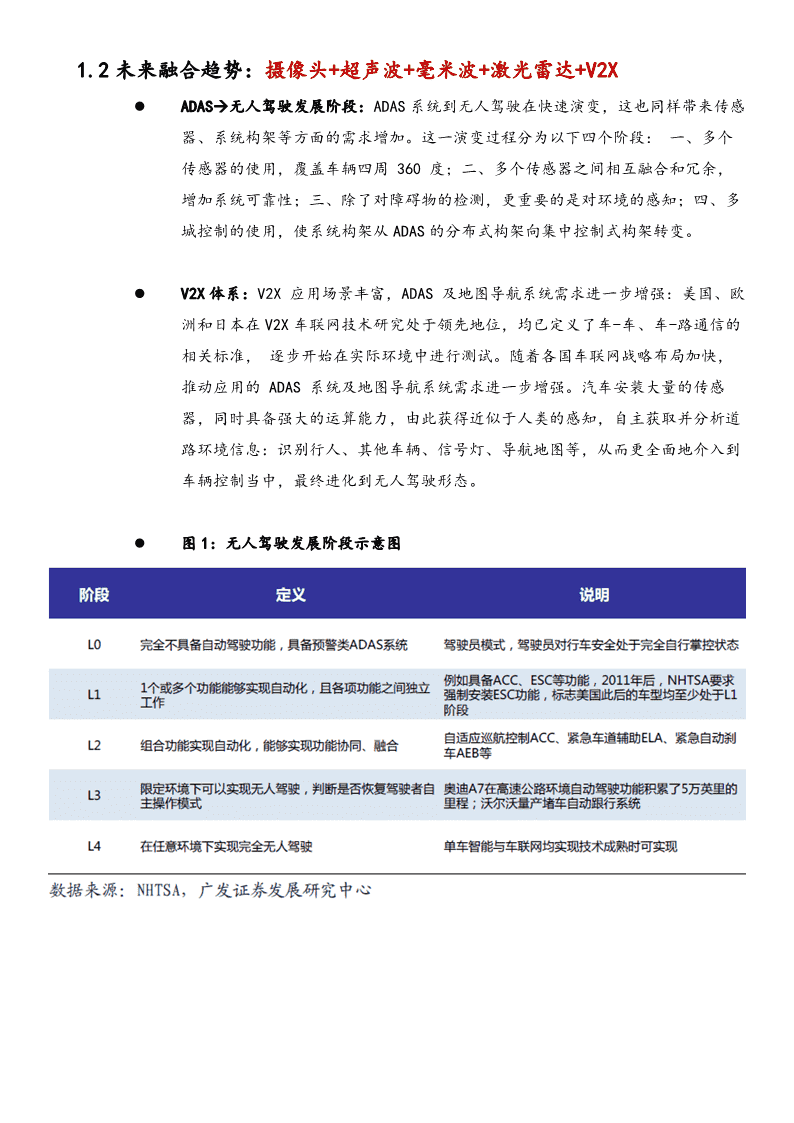
图2:智能汽车包含的系统示意图图3:ADAS系统示意图图4:ADAS与无人驾驶产业链示意图
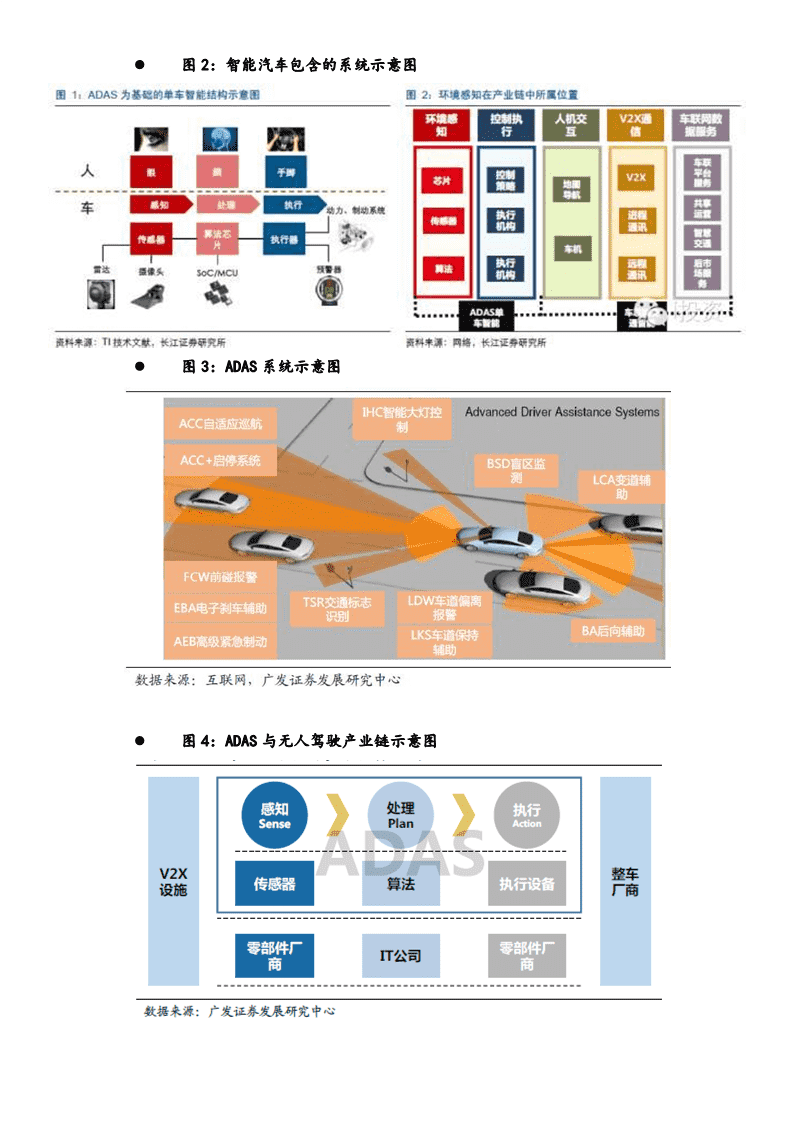
2无人驾驶的各传感器概览2.1各传感器概述:发展态势各有千秋,各有高投资价值之处车载摄像头:摄像头产业的下一个蓝海图像识别的特性让摄像头应用广泛,未来单车将配备6颗以上摄像头,打开巨大空间。车载摄像头模组毛利高、增长快,将是摄像头产业下一个蓝海。CMOS、模组作为摄像头主要价值部分将大幅受益。毫米波雷达:不可或缺的高可靠性保障毫米波雷达在全天候下都能保证稳定的测距功能,是AEB、ACC及半自动驾驶等安全等级较高功能的必要传感器。目前毫米波雷达价值大、壁垒高。尚被国外企业垄断,成功突破将有望实现进口替代。夜视系统:高端向低端渗透夜间是事故的高发时段,夜视系统有极大实用性。目前夜视系统价值极高,仅在豪华车型上装配,渗透率不足0.1%。国内自主品牌已试水夜视系统,随着成本下降,夜视系统有望提高渗透率,打开成长空间。激光雷达:低成本方案将加速无人驾驶进程激光雷达在无人驾驶中通过3D建模实现环境感知和增强定位,是现阶段实现无人驾驶的最有效手段。成本过高是激光雷达大规模应用的核心制约,目前“降维”、“固态激光雷达”等方案正在试验之中,研发成功将极大加速无人驾驶进程。2.2传感器对比图表:摄像头、毫米波雷达、红外夜视、激光雷达
传感器功能优点缺点摄像头通过机器视觉技术可实成本较低、可实现多种算法复杂、信息处理负担测量范围200米现多种ADAS功能功能、能够识别障碍物重、环境/光线条件恶劣下低端35-50美元,高种类、Mobileye已实现容易失效、三维信息测量端数百美元小型化视觉摄像头用于精度低、需加装多个摄像自动驾驶头以获得三维信息毫米波雷达可以探测出障碍物的距性能稳定、探测距离远、无法识别图像目标的信测量范围50-250米离、方向、大小、与本体受天气条件影响小息,如交通指示牌150-300美元的速度差激光雷达对周边环境实现精确刻对周边环境进行精确扫机械式体积较大、成本高、测量范围200米画,探测出距离、方向、描、包含平面和深度信无法识别图像信息如交通8000美元以上,部分大小、移动速度息、形成3D建模、方向指示牌固态雷达数百美元指向性好、不受地面杂左右波干扰、固态式体积较小夜视系统可实现夜间视觉夜间工作效果非常理想成本过高,仅高端车负担测量范围200米得起;仅在夜间以及其他10000美金低光照条件下应用
图5:3类传感器市场预测;图6:互联网企业与传统车厂的传感器选择
3毫米波雷达分析3.1技术原理和系统:是ADAS系统核心之一,主流是调频连续波方式技术概况:毫米波雷达的性能优良,在空间、军事、直升机和汽车方面都得到广泛应用,特指雷达波长为1~10mm的电磁波称毫米波(millimeterwave),汽车毫米波雷达正是实现ADAS乃至无人驾驶的核心部件之一。工作原理:工作原理有两类,分为调频连续波(FMCW)、脉冲压缩。FM-CW采用的是发射高频连续波技术。与此相对的是,脉冲压缩雷达是通过发射已调制的宽脉冲,对回波信号进行压缩处理得到窄脉冲的雷达技术。经过对回波信号的处理,从而,获得物体的方位、距离、相对速度差。系统组成:汽车微波/毫米波雷达主要由天线、前端雷达传感器和后端信号处理器组成。其中雷达传感器是最关键核心部件,而目前汽车雷达传感器都采用集成电路技术实现。一个典型的FMCW汽车雷达系统包括天线、接收模块、信号处理模块和报警模块或汽车制动装置。图7:FMCW汽车毫米波雷达防碰撞系统原理图技术类别:国内外主流汽车毫米波雷达频段为24GHz和77GHz。①其中,24GHz用于实现近距离探测(ShortRangeRader,简称SRR),探测距离15-30米,因波长超过了1cm并达到12.5mm长,可叫微波雷达,也可叫毫米波雷达;77GHz用于实现远距离的探测(LongRangeRader,简称LRR),探测距离100-200米。24Ghz雷达和77Ghz相比,直线性差一些,但能够监测到金属物。参照这样的特性,一般是使用24Ghz探测周围车辆,使用77GHz探测前方车辆。
运作过程:①近距离探测SRR实现ADAS功能如下:自适应巡航控制ACC(AdaptiveCruiseControl)、前向防撞报警FCW(ForwardCollisionWarning)、盲点检测BSD(BlindSpotDetection)、辅助停车PA(ParkingAid);辅助变道LCA(LaneChangeAssistant);②远距离探测LRR实现自主巡航控制ACC功能,其通过调整速度以适应交通状况;③汽车控制系统根据毫米波雷达检测的压力信号来控制汽车的刹车系统。通过SRR和LRR相结合和对汽车的控制,可以立体式、全方位为汽车提供行车安全。3.2优劣因素分析:传输距离远,全天候,抗恶劣天气强,行人识别差优势因素:①毫米波雷达稳定性高、传输距离远、抗环境干扰能力强、可全天候工作,在传输窗口内大气衰减和损耗低,穿透性强,不受光线、雾霾、沙尘暴等恶劣天气的影响;②毫米波元器件的尺寸小,重量轻,更容易小型化;③毫米波在大气中的传播损失主要来自水汽、雨、雾和氧分子对电磁能量的谐振吸收。传播损失与工作频率有一定的关系。与光波(红外、可见光、紫外光)相比,毫米波在云雾、烟、尘中传播的损失要小得多。劣势因素:①毫米波雷达所发射的电磁波在传播路径上遇到尺寸比波长小的物体时,将会发生衍射现象,即波的大部分能流绕过物体继续向前方传播,反射回来可供雷达接收的能量则很小,因此,无法探测大量存在的小型目标;②行人的反射波强度相比金属汽车会弱千分之一(-30dB),FMCW技术会将其与其他物体的反射波混同,因此无法识别,存在较大的危险性。3.3行业构成和预测:市场前景巨大,国外垄断严重,国内企业在追赶主要企业:①毫米波雷达技术过去主要由大陆、博世、电装、TRW、奥托立夫等国外传统零部件巨头所垄断,其市场占有率基本等于其ADAS占有率;②汽车毫米波雷达传感器集成电路基本为三分天下,恩智浦/飞思卡尔、ST和英飞凌,三家都有完整的汽车雷达方案;③77GHZ雷达的开发难度更高,目前只有博世、大陆(子公司ADC)、德尔福、电装、TRW(AutoCruise)、FujitsuTen、Hitachi等公司掌握。核心能力:①毫米波雷达壁垒较高,后端的控制系统策略是零部件巨头的技术核心,零部件巨头对毫米波雷达的掌控除了硬件工艺本身,对于后端得到毫米波雷
达信号的处理及决策是其核心竞争力。整车厂拿到毫米波雷达,没有零部件公司的技术支持经常手术无策。②毫米波雷达对于国内来说研发难度极高,体现在以下几点.A)高频毫米波雷达芯片对于我国长期处于禁运管制状态,国内难有机会接触和开发;B)毫米波雷达算法要保证精确过滤数据信息得到正确的探测目标,同时实现稳定及高效;C)毫米波雷达涉及主动控制类高等级汽车安全,工艺等级要求极高;D)毫米波雷达通常和AEB、ACC系统一起供应,需要对底盘技术有很深理解。③MMIC芯片和天线PCB板是毫米波雷达的硬件核心。A)前端单片微波集成电路MMIC:它包括多种功能电路,如低噪声放大器(LNA)、功率放大器、混频器、甚至收发系统等功能。具有电路损耗小、噪声低、频带宽、动态范围大、功率大、附加效率高、抗电磁辐射能力强等特点。毫米波雷达的关键部件前端单片微波集成电路MMIC技术由在国外半导体公司掌控,而高频的MMIC只掌握在英飞凌、飞思卡尔等极少数国外芯片厂商手中。国内的MMIC仍处于起步状态,厦门意行和南京米勒为正在研发雷达MMIC,相关性能仍有待验证;B)雷达天线高频PCB板:毫米波雷达天线的主流方案是微带阵列,简单说将高频PCB板集成在普通的PCB基板上实现天线的功能,需要在较小的集成空间中保持天线足够的信号强度。77Ghz雷达更高规格的高频PCB板,77GHz雷达的大范围运用将带来相应高频PCB板的巨大需求。目前全球仅罗杰斯、Schweizer等少数公司拥有相关技术。国内PCB板优秀公司沪电股份已经与Schweizer展开了深度合作。77Ghz国内之前一直积累不深,最大的原因是77Ghz雷达的MMIC芯片一直是封锁阶段。自2015年开始,77GhzMMIC芯片逐渐对国内学术和民用放开,部分高校已经获得相关芯片。东南大学是国家唯一的毫米波雷达重点实验室,具备先进的高频雷达测试设备,在国内毫米波雷达研发中走在前列。国内新兴企业:①厦门意行半导体科技,在24GHz汽车主动安全雷达射频前端集成电路取得突破外;②沈阳承泰科技,在研发77GHz汽车毫米波雷达上也取得突破;③华域汽车,以24GHz的SRR毫米波雷达为切入点,开始逐步建立其自身ADAS产品路线图;④北京行易道科技、亚太机电集团投资的杭州智波科技在77GHz毫米波雷达方面有一定的技术优势。国外新型技术:大陆集团研发的行人识别功能将距离探测方式从以往的“FMCW方
式”转变为了“脉冲压缩方式”。采用脉冲压缩雷达可以对较强和较弱的反射波进行分离,从而实现对行人反射波的识别功能。安装了测量距离更长、不受昼夜差别的影响以及在恶劣天气条件下仍可以发挥作用的毫米波雷达的防碰撞系统,将可能由此逐渐开始普及。这种新型毫米波雷达已于2015年下半年开始量产。与此同时,欧洲新车安全评鉴协会(EuroNCAP)也计划,2016年开始在自动刹车试验中增加行人识别试验并制定相关评分细则。市场预测:①根据PlunkedtResearch的调查与预测,2014年全球的毫米波雷达市场出货量在1900万颗,预计到2020年全球毫米波雷达将毫米波雷达将近7200万颗,未来五年的复合增速约为24%。②根据长江证券产业调研,国内2014年车载毫米波雷达销量约为120万颗,2015年约为180万颗。主要应用为盲点检测和后方车辆提醒的中短距雷达(24Ghz),每车需要两颗。假设:A)2015-2020年我国的乘用车复合增速为4%,到2020年乘用车全年销量约为2490万辆;B)2020年,后方探测/BSD的渗透率为15%(需要2颗中短距雷达;ACC/AEB功能渗透率到10%(需要1颗长距雷达,2颗中短距雷达放置前方);基于以上假设,推算2020年的毫米波雷达需求量近770万个,未来五年复合增速为34%。行业现状与趋势:①已成为业界公认的主流选择,拥有巨大的市场需求,因而也是汽车电子厂商当前的主要研发方向;②欧美地区几乎所有的汽车均开始配备汽车毫米波雷达;③国内由于高频器件较贵,开发难度高,一直鲜有汽车电子厂商在这个领域有所突破;④国外巨头垄断严重,由于毫米波雷达传感器在军用通讯、卫星通讯有较多运用,并且60GHz以上的毫米波技术西方对于中国是禁运的,因此国内发展相对较为缓慢;⑤随着国产24G/77GHz汽车毫米波雷达MMIC芯片取得突破后,2016年将会是国内汽车毫米波雷达行业的关键年度,特别是今年下半年各大厂商对毫米波雷达资源的战略布局会提速,汽车毫米波雷达国产化大潮来临,我国在这一领域有望缩小与国际巨头差距,进而实现弯道超车。
4激光雷达4.1技术原理与系统:通过发射激光,扫描形成点云,进行3D建模技术概况:激光雷达起源于军方技术,比如跟踪激光雷达、制导激光雷达、测绘激光雷达、水下激光雷达、避障导航激光雷达。近两年,激光雷达开始应用在商业级的无人机、机器人、无人驾驶汽车上。工作原理:与雷达原理相似,激光雷达使用的技术是飞行时间(TOF,TimeofFlight)。具体而言,就是根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离。激光光束可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境图像,精度可达到厘米级别,从而提高测量精度。可以对周边环境的动态信息和位置分布实现准确刻画,技术类别:按有无机械旋转部件,可分为机械激光雷达和固态激光雷达。根据线束数量,也可分为单线束激光雷达与多线束激光雷达。系统构造/运作过程:见图8。不同激光雷达的构造存在差别,不过大致由发射系统、接收系统、信息处理等部分组成。以拆解后的Velodyne64线产品为例。从正面看,整个激光收发器可以视为上下两部分,每部分都有三个并排透镜,两侧透镜是激光发射处,中间是接收处。转到产品背后会发现,两侧凸镜后各有16个一组的二极管,中间透镜对应32个接收器,可以把光信号变成电信号。激光光束从两侧透镜发出,遇到障碍物折返后经过中间透镜被抓取,接收器处理分析后判断障碍物位置。所有的时间信息、控制信息、接收信号都会传到顶端的主板上进行信息处理。底部的旋转记录器会记下旋转时所在位置和旋转信息。所有原始数据可以通过底部数据线传送至电脑。为了让机器旋转时保持平衡,这款64线激光雷达加装了一个沉重的底座。工作时这款产品垂直方向有64条光束放射状射出(线数),可以覆盖垂直方向26°的角度(垂直视角),抵达100-120米的远方(检测距离),探测障碍所在位置的误差大约10cm左右(精度)。通电后底座马达会驱动激光雷达每秒旋转10次(频率),从而覆盖水平360°的视域(水平视角),每圈输出13万个信息点(点密度),形成所谓的“点云”。
图8:拆解后的Velodyne64线激光雷达系统构造图图9:激光雷达系统构造和运作示意图图10:单线和多线雷达对比图(固态雷达暂时公开数据不多)
4.2优劣因素分析:性能优越,探测精准,成本昂贵但正在降低优势因素:①相比于摄像头,激光雷达的最大优势在于使用环境限制较小,即不管在白天或是夜晚都能正常使用;②而用于雷达系统的激光波长一般只有微米的量级,因而它能够探测非常微小的目标,测量精度也远远高于毫米波雷达及其他车载标准雷达;③激光雷达从实验室走出到商业化应用,正在经过从高成本到低成本的过程,未来有望实现低成本。劣势因素:①激光雷达价格昂贵。激光雷达的测量精度与其雷达线束数量是直接相关的,线束越多越精准越安全,其价格也越昂贵;②虽然低成本化是激光雷达的一大趋势,但出于对驾驶安全性的考虑,高价激光雷达短期仍然占据主流;③无法识别图像信息,如交通指示牌。4.1行业构成和预测:市场前景较大,国外技术领先,国内也有优秀者主要企业:①美国的Velodyne,其产品是高价格的多线束机械转动式激光雷达,HDL-64E激光雷达售价曾高达数十万元万人民币,目前Velodyne的价格正在持续下降,16线条已经下降到数千美元;②美国的Quanergy,其产品是低成本的固态激光雷达,成本可能低至数百美元;③德国的Ibeo。【以上主要针对自动驾驶。测绘型激光雷达产品主要应用于测绘领域,不在本文研究范围内。】图11:Velodyne的产品性能和价格表
国内新兴企业:①中海达的iScan三维激光测量系统是首个车载激光雷达装置,中海达与百度达成合作,为百度提供国内城市的高清激光街景数据采集及生产;②北科天绘的R-Angle系列车载激光雷达系统2015年获得测绘科技进步一等奖,并与四维图新合作完成了全国范围内高等级公路的ADAS道路数据获取与处理;③速腾聚创,深圳哈工大人员研发的激光雷达,主要面对服务机器人,最近新开发了车用的激光雷达,获得复星昆仲数千万人民币的A轮投资,估值10个亿;④创鑫激光的胡晓波组建的镭神智能,主要是二维和三角测距雷达,也有自动驾驶雷达,技术较为粗糙,获得北极光创投1000万元投资。国外新型技术:【引用新闻,信息较多】①电子激光雷达还在实验阶段,机械激光雷达作为成熟技术,仍为市场主流。作为Quanergy的合作伙伴,德尔福公司看重激光雷达产品的长远发展。其首席技术官员JeffOwens将激光雷达电子化视为未来一大趋势,认为“雷达在过去20年中经历了从机械转动向电子扫描或者说是聚束形成技术转变的过程,激光雷达也将走上同样的道路”。电子激光雷达还是一项新技术,从科研转化为一款可用产品,要历经多次测试和市场检验。据悉,Ibeo目前也在研究电子激光雷达技术,但是因为技术尚未转化为成熟产品,因此没有选择对外公开更多消息。从此次CES上IEEE的的简单体验来看,QuanergyS3产品没有赶上期望进度。有业内人士表示,激光雷达产品从概念到最终量产,要经过3-5年的测试期,根据S3目前的进展,时间紧迫。不过也有乐观观点,虽然离真正使用还有不少时间,但是这款产品依然可以唤起市场对小型车用激光雷达的注意。【引用新闻,信息较多】②Ibeo的激光雷达产品LUX,改为固定激光光源,通过内部玻璃片旋转的方式改变激光光束方向,实现多角度检测的需要。福特订购的Velodyne新产品Solid-StateHybridUltraPuck™Auto,是款长相类似冰球的半固态激光雷达,也将旋转部件做到内部隐藏起来。比较特别的是,Quanergy旗下产品S3是一款全固态产品,使用了相位矩阵这种新技术,内部不存在任何旋转部件。【引用新闻,信息较多】③因为激光雷达产品专业性强,自动驾驶又堪称一次漫长的行业革命,激光雷达企业进入市场方式存在细分。Velodyne新产品Solid-StateHybridUltraPuck™Auto不会公开外售卖,Velodyne会根据车企具体计划和产品要求进行定制,并在多次测试中根据反馈调整产品。
市场预测:将激光雷达单列源于激光雷达的不可确定性,目前激光雷达过于昂贵难于进入大规模运用。但目前“降维”和“固态激光雷达”有望大幅降低激光雷达成本,行业内普遍假设2020年激光雷达方案或降低到2000美元水平,2025年随着无人驾驶或高度自动驾驶汽车商业化,全球市场需求将有110亿美金,且成为未来核心传感器。行业现状与趋势:结合Velodyne、Quanery、Ibeo等三个主要厂家的最新状况,国外和国内主流厂家选择了几条不同路线。①降维,即使用低线束低成本激光雷达配合其他传感器;②通过规模效益降低激光雷达的单个成本。;未来的发展方向将会从机械走向固态,从单线束走向多线束。固态激光雷达与机械激光雷达比起来,从机扫式到电子式,尺寸较小、性价比较高、测量精度相对低一些,可隐藏于汽车车体内,不会破坏外形美观。多线束激光雷达则会比单线束视野范围更广。应用的发展瓶颈在于成本;③一旦激光雷达成本大幅下降,无人驾驶普及的推广进度将显著加快;④应用窄线宽的激光器,能量传输更稳定,可以将探测距离扩展到数百、数千米。激光起振后,会有一个或多个纵模产生,每个纵模的频率的范围就是激光的线宽。图12:各厂商路线图'
您可能关注的文档
- 2013-2017年汽车传感器行业竞争格局与投资战略研究咨询报告
- 2016-2021年中国速度传感器行业市场前景与投资战略研究报告
- 2016-2021年中国速度传感器行业市场调查与投资前景研究报告
- 中国传感器行业发展研究报告
- 智能传感器行业调研分析报告
- 中国温度传感器行业供需现状及投资建议咨询报告
- 中国激光位移传感器行业市场调查研究及发展趋势预测报告
- 2011-2015年中国汽车传感器行业市场前景及投资分析预测报告
- 智能化传感器行业的市场发展前景分析
- 2013-2018年中国物联网传感器行业市场专项调研及投资风险研究报告
- 传感器行业调研分析报告
- 2011-2015年中国传感器行业分析和场预测报告
- 传感器行业投资策略报告
- 浅谈我国传感器行业发展前
- 中国传感器行业市场行情动态及未来发展趋势研究报告
- MEMS传感器行业分析报告
- MEMS传感器行业分析报告文案
- 2010-2015年传感器行业深度评估 (2).pdf